Introduction
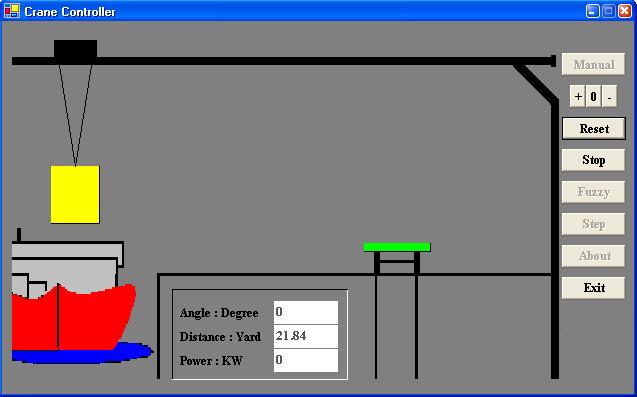
The container (yellow) is already picked up from the ship (red). It must be positioned over the truck (green). The values of Angle and Distance are computed by the process simulation, while Power is the control variable either set manually or by the fuzzy logic controller. The fuzzy logic controller using the human operator's experience. A human operator is capable of controlling a crane without differential equations.
Implementing a Linguistic
Control strategy sensors for the crane head position Distance and the angle of the container sway Angle are employed to automate the control of this crane. Using these inputs to describe the current condition of the crane, for example :
IF Distance = medium AND Angle = neg_small THEN Power = pos_high
The figure below shows the complete structure of a fuzzy logic controller:

Fuzzification
Linguistic variables have to be defined for all variables used in the if-then rules. For the crane controller, the terms are:
Distance: {neg_close, zero, close, medium, far} Angle: {neg_big, neg_small, zero, pos_small, pos_big} Power: {neg_high, neg_medium, zero, pos_medium, pos_high}.
For every linguistic variable, each term is defined by its membership function.
Consider a possible situation for the crane where the Distance of the crane head to the target position is 12 yards and the Angle of the container is -30 degrees.
A Distance of 12 yards is a member of the fuzzy sets for the terms :
medium to the degree of 0.83 far to the degree of 0.17 - and other term's degrees are 0.00
An Angle of -30 degrees is member of the fuzzy sets for the terms :
neg_big to the degree of 0.4 neg_small to the degree of 0.6 - and other term's degrees are 0.00
Fuzzy-Inference
Using If-Then rules now that all input variables have been converted to linguistic variable values, the fuzzy inference step can identify the rules that apply to the current situation and compute the value of the output linguistic variable. Consider the above example:
The IF part combines the two conditions Distance = medium and Angle= neg_small. The IF part defines whether the rule is valid in the current situation or not. In conventional logic, the combination of the two conditions can be computed by the Boolean AND as shown in the following figure:
In the case of fuzzy logic, the Boolean AND cannot be used as it cannot cope with conditions that are more-or-less true. Hence, new operators had to be defined for fuzzy logic to represent logical connectives such as AND, OR, and NOT.
The IF part of the above example can be computed as shown:
min{ 0,83; 0.6} = 0.6
Defuzzification
At the end of the fuzzy inference, the result for Power is given as the value of a linguistic variable. In order to use it to set the motor power, it has to be translated into a real value. The relation between linguistic values and corresponding real values is always given by the membership function definitions. The figure below plots the membership functions for the linguistic variable Power.
I use a method of defuzzification is called Center-of-Maximum and is identical to the Center-of-Gravity method using singleton membership functions. These defuzzification methods are used in most fuzzy logic implementations.
Code Sample
The application consists of many functions and objects, but my favorite subject in this application is that of Fuzzy Logic. I wrote the fuzzy function by the above membership functions and concepts of fuzzy logic. Here is the fuzzy function :
public double fuzzy()
{
if((angle<-60)&&(angle>=-90))
neg_small=0;
else if((angle<-10)&&(angle>=-60))
neg_small=(0.02*angle+1.2);
else if((angle<0)&&(angle>=-10))
neg_small=(-0.1*angle);
else if((angle<=90)&&(angle>=0))
neg_small=0;
if((angle<-60)&&(angle>=-90))
neg_big=1;
else if((angle>=-60)&&(angle<-10))
neg_big=(-0.02*angle-0.2);
else if((angle>=-10)&&(angle<=90))
neg_big=0;
if((distance<5)&&(distance>=-10))
medium=0;
else if((distance<10)&&(distance>=5))
medium=(0.2*distance-1);
else if((distance<22)&&(distance>=10))
medium=((-1/12)*distance+(11/6));
else if((distance<=30)&&(distance>=22))
medium=0;
if((distance<10)&&(distance>=-10))
far=0;
else if((distance<22)&&(distance>=10))
far=((1/12)*distance-(5/6));
else if((distance<=30)&&(distance>=22))
far=1;
return
System.Math.Round(System.Math.Max(System.Math.Min(pos_small,zerodis),
System.Math.Min(pos_small,close))*neg_medium_pow+System.Math.Max(
System.Math.Min(zero,zerodis),System.Math.Min(zero,close))*zero_pow+System.Math.Max(
System.Math.Max(System.Math.Min(neg_small,close),System.Math.Min(neg_big,medium)),
System.Math.Min(zero,far))*pos_medium_pow+System.Math.Max(System.Math.Min(neg_small,
medium),System.Math.Min(neg_small,far))*pos_high_pow,2);
}
In Conclusion
Please, notice that my simulation program isn't a scientific simulation. My application is not pretty because I'm a beginner, but I think it is almost working properly. What do you think?
Have a good time.
History
- 2nd February, 2008: Initial post
This member has not yet provided a Biography. Assume it's interesting and varied, and probably something to do with programming.


 General
General  News
News  Suggestion
Suggestion  Question
Question  Bug
Bug  Answer
Answer  Joke
Joke  Praise
Praise  Rant
Rant  Admin
Admin 




